SIGS优硕风采| 不确定性

文章插图
编者按
2021年,清华大学深圳国际研究生院校优秀硕士学位论文篇数再创历年新高,占全校优秀硕士论文31%,共有63篇荣获清华大学优秀硕士学位论文,其中44篇为我院专职教师指导。本系列推送将向大家展示我院获奖同学的科研成果风采。

文章插图
【SIGS优硕风采| 不确定性】论文中文标题:基于单目相机的驾驶环境重建与应用研究
论文英文标题:Research on Driving Environment Reconstruction and Application Based on Monocular Camera
作 者:贾邵程
指导教师:裴欣
培养院系:自动化系
学 科:控制工程
学习感言:兴趣是最好的老师
获得荣誉:清华大学优秀硕士学位论文、清华大学综合优秀一等奖学金、富士康奖学金
研究背景/选题意义/研究价值
近年来,人工智能和深度学习技术已经被深入研究和广泛应用,尤其以自动驾驶为核心的智能交通技术吸引了国内外众多研究机构和产业界的广泛关注,而环境感知作为自动驾驶中的一个基础任务,更是成为极具吸引力和前景的研究方向。其中,精确的感知或重建当前的驾驶环境,尤其是恢复场景的三维结构对自动驾驶车辆的决策制定和安全评估有着十分重要的意义。尽管许多先进的感知设备已经被应用到自动驾驶系统中,但高昂的价格以及复杂环境造就的应用限制,导致很难大规模应用。另一方面,直接对激光雷达获取的点云数据进行处理的计算成本较高。相对而言,通过相机得到的图像和视频数据具有来源广泛、应用简单、实时性好等优良特性。因此,大量的基于图像和视频恢复场景的三维结构的研究不断涌现。
论文对基于单目图像和视频的三维重建技术进行了深入研究,就存在的问题深入剖析,并提出相应的解决方案。在监督学习范式下,提出关联结构来对深度之间的关系进行建模,该结构可有效改善困难区域的估计效果,如反光、远处、细节区域。其次,提出高斯估计器对深度图进行估计,同时输出像素级不确定图,该不确定性图表征了网络对相应像素的估计信心,也反映出该像素点的估计难度。基于此,简单有效的数据预处理和可靠性感知掩膜被提出来消除不确定性区域带来的影响,进一步改善网络的性能。最后,论文对重尺度策略也进行了探索,所提出的模型在领域内标准数据集上均获得最佳性能。
主要研究内容
文章插图
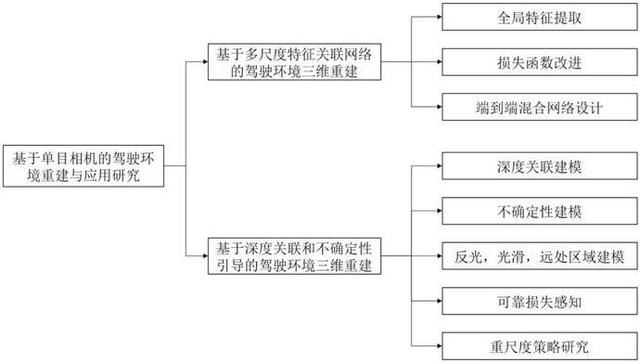
论文将对基于单目车载相机的三维重建方法进行研究,包含有监督方式和自监督方法。在有监督情况下,主要探索如何从单目图像中提取出综合视觉特征,同时能够包含局部和全局特征,并对损失函数进行改进,使得更好地适应大范围的深度值;在自监督情况下,主要探索如何建模像素之间的深度关系、如何对不确定性进行建模、如何利用不确定性估计来进一步提高重建性能,包括对反光、光滑、远处区域进行建模以及对可靠损失进行感知。最后,也对重尺度的策略进行了研究,详见如上图所示。
论文主要创新点
1、提出了一种新颖的多尺度特征关联混合网络,以特征关联模块为核心,将注意力机制,卷积神经网络和循环神经网络融为一体,有效提取图像的综合特征,改善三维重建的精度。
2、针对传统损失函数对于大深度值的优化偏好,提出了新的损失函数,可以有效地对大范围的深度值进行回归,提升了估计的性能。
- 杨幂穿职业装出席活动 知性干练展OL女性风采
- 69岁“女儿国国王”近照曝光,端庄大方风采依旧
- SIGS科研|信息学部论文入选IEEE计算机与通信国际会议
- 展会|守住安全底线 展示宝鸡风采 全力做好第四届中国(宝鸡)国际机器人及智能制造展览会各项筹备工作
- 靓丽闪耀的包臀裙穿出别样风采,充满女人的时尚韵味,简约好看
- 新松|人才兴鲁展风采|山东新松平台聚才,突破智能制造发展瓶颈
- 群英汇聚秦创原 创新驱动展风采 2021西安国际创业大赛圆满落幕
- 美女秘书黑丝搭配高跟鞋,大长腿的风采一览无遗
- “疫”线瞬间 风采动人
- 隐退六年,59岁董文华正式复出,容颜未改风采依旧