压力|科学家研发了现实版“无限手套”,能抓能感知,帮助肢体恢复功能( 二 )
如今人工智能在
为了识别物体,研究团队创建了一个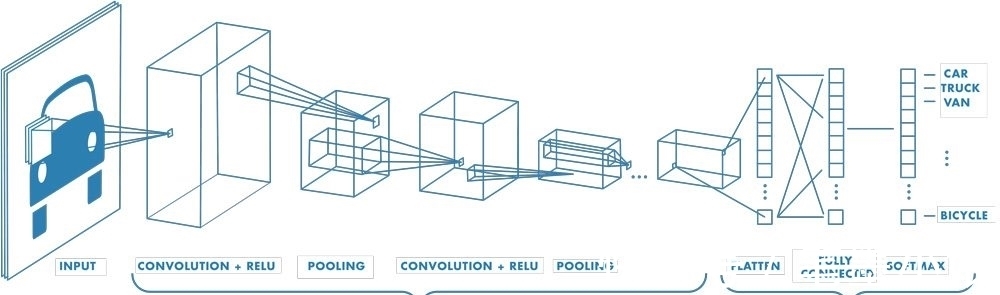
文章插图
其实,人类可以很好地识别和处理物体,因为我们有所谓的触觉反馈。当我们触摸物体时,我们会感觉周围并意识到它们是什么,机器人却没有那么丰富的反馈。
在评估一个物体时,卷积神经网络首先会将相似的压力图组合成簇类——每个簇对应于对物体的特定抓握,也就是使用类比法的深度机器学习。
然后从每个集群中选择一个代表性地图来创建一组与特定对象相关联的地图,最后通过将对象的压力图与代表性图集进行比较,训练神经网络以识别被操纵的对象。
总结
科学的进步对人类的影响是显而易见的,科幻中许多理想的科技,在人类看来不是很遥远,虽然现实版的无限手套嵌入的不是宝石,而嵌入手中的只是一些神经传感器,目的是帮人先天残疾的人士恢复肢体完整的功能。即使是这样,跟科幻相比微不足道,但对残疾人来说这已经是很伟大的创举。
传感器手套目前离灵活应用手套的程度还需要一段时间,最初为了估计物体的重量,研究团队创建了一个单独的数据集,其中包含11,600个压力图,这些数据是在物体被捡起、握住然后掉落时获取的。在这种情况下,神经网络系统被训练为根据保持物体所需的压力来计算物体重量。
据研究团队称,这个系统能够以
手套还提供了有关手的不同部分如何协同工作以执行某些任务的理论见解。他们发现,当受试者使用食指的中间关节时,他们很少使用拇指,相反地,他们发现使用食指和中指的指尖总是对应于拇指的使用。
这项研究可以帮助工程师模仿手的功能来制造更好的假肢和机器人抓手。用触觉手套覆盖机械手可以给设备一种触觉,让它们以更逼真的方式操作。此外,计算机视觉算法可以适用于手套,从而催促产业链在现有的基础之上产生涉及触觉感知的新技术。
- 苹果|库克压力确实大,在众多国产厂家对标下,iPhone13迎来“真香价”!
- iqoo|iQOO Z5x兼备长续航与优质好屏,无压力畅玩游戏
- DeepMind首席科学家:比起机器智能,我更担心人类智能造成的灾难
- 发现最小白矮星,其大小相当于月亮,这让科学家很兴奋
- 猪心移植人体成功的背后,站着一位华人女科学家
- 试剂盒|中国研发团队推出“更灵敏”试剂盒获批上市 可精准探测德尔塔、奥密克戎
- 联想|司马南没告诉你们,当年联想的使命根本不是研发,而是赚钱养计算所
- 单片机|OPPO最新实验室曝光:与华中科技大学联合打造,将加速新技术研发
- 衰老还有秘密?科学家再次大胆尝试,将人类肌肉细胞发往太空
- 小米投资 UWB 芯片研发商优智联,浩云科技已参股