星际舟|深挖第五种智能驾驶感知技术:解决低光场景感知痛点,实现量产,还低成本?( 二 )
类似地,欧洲2018年的ERSO报告也指出:车辆、行人、自行车等事故率高峰大多发生在低光环境(时段)。
文章插图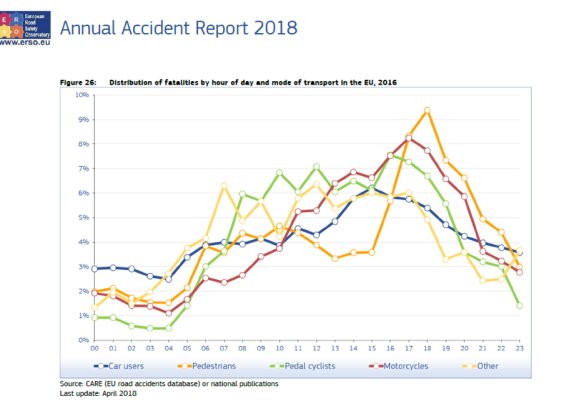
文章插图
智能驾驶诞生的初衷是为了提高行车安全性,解放人力,并拓广车辆的驾驶和应用场景,突破人可以操作的工况,但由于现有感知技术局限性,当前的高级辅助驾驶还不足以实现全天候工况下运行;而目前在自动驾驶中,则不得不使用过多的传感器来弥补单一传感器的不足,进而增加成本,增加故障点,而且并不能完全解决全天候工况问题。
因此如何突破技术瓶颈,提升智能车辆在夜间、雨雪雾霾、炫光等场景的安全性,迫在眉睫。
另外,就商业价值而言,为了提高安全性,降低保险费用,降低人力成本,货运、矿区、港口、环卫等细分场景,也对智能驾驶在夜间或低光工况下的应用有着十分迫切的需求。
国内外不少智驾企业已经开始探索相应解决方案。比如去年,阿里达摩院宣布已自主研发出用于车载摄像头的ISP处理器,达摩院自动驾驶实验室的路测结果显示,使用该处理,车载摄像头在夜间的图像物体检测识别能力比业内主流处理器有10%以上的提升。
元戎启行则在激光雷达的基础上,提出了自研的3D物体监测网络模型HVNet,表示即使在雨天、夜晚等条件下,也能精准感知障碍物。
除此之外,热成像传感器也渐渐走入行业的视线,它可以做到在无任何可见光的情况下对发热物体成像,而且能够弥补激光雷达无法对物体进行分类的自然缺陷,但其缺陷也是显而易见。
由于红外热成像技术主要是通过热辐射收集信息,热成像传感器对冷物体不能成像(车道线、交通标识牌等),相比可见光图像,其成像分辨率低、信噪比低、硬件耐用性差,对于径向运动物体的检测能力较差,成本也昂贵得多。
【 星际舟|深挖第五种智能驾驶感知技术:解决低光场景感知痛点,实现量产,还低成本?】今年,苹果就有一项汽车夜视系统获得了专利,该系统结合了可见光、近红外(NIR)和长波红外(LWIR)传感器,苹果试图利用这几种互补的图像传感技术的组合,来解决夜间或低光环境下物体检测和分类的挑战。
另辟蹊径:第五种智能驾驶感知技术面对以上种种当前传感器的局限性,星际舟找到了另一种突围方式。
据悉,星际舟研发团队自主研发了基于近红外光的门控成像识别技术,有效解决了在白天、夜间低光/炫光、雨雪雾(霾)等全天候工况下的成像和识别,基于此技术产品开发的ADAS产品和自动驾驶解决方案也适用于全天候工况,可突破目前智能驾驶汽车只能在好天气情况下使用的尴尬局面,还有望取代价格高昂的激光雷达传感器,进而减少了传感器的使用量,降低了成本,为自动驾驶突破从“开发,不计成本”阶段到真正可“用得起”的量产阶段奠定了基础。
“门控”技术则是系统可以根据外部环境自主调节快门与近红外光源脉冲的联动策略,使系统可以主动适应不同的复杂场景,使得功耗最小,成像效果更佳。
鉴于该成像模组的高帧率输出(>100帧/秒),星际舟建立了具有自主知识产权的“自适应切片网络模型”,再结合公司百万公里全天候数据集,实现了星际舟识别产品在白天、夜间低光及夜间炫光、雨雪雾(霾)和出隧道超级曝光环境下同时对物体成像识别,其效果如下列所示:
文章插图
- 任正非|任正非与孟晚舟的姓氏为什么不一样?
- 近日嵊泗县五龙乡渔人码头多了一项隐藏技能咋回事第三代“绝酷”波浪发电机成功下水拥有国际专...|舟山真“能”,浪高0.3米就可发电
- 嵊泗县|舟山嵊泗县花鸟乡花鸟村
- 知道|星际旅行来了!美国计划利用激光将活体动物发射进深空,20年后冲出太阳系_产经_前瞻经济学人
- 明日方舟暮落精英材料是什么?明日方舟暮落培养材料汇总
- 信息安全|2021年度IT影响中国:银核星际离盾PLUS获“2021年度最佳信创产品”奖
- 华为|孟晚舟事件中的汇丰银行:为了构陷华为,他们策划了近十年
- 航天员|神舟十三号航天员乘组圆满完成手控遥操作 天舟二号货运飞船与空间站组合体交会对接试验
- 华为|从M晚舟在华为拿七级工资或许能联想到点什么
- cdn|每天睡后收入30元!京东云、星际比特,打工人的PCDN折腾经验,全部分享!