测距|乐动机器人激光雷达对比:DTOF激光雷达VS三角激光雷达
激光雷达作为众多智能设备的核心传感器,其应用范围越来越广泛,我们能够在扫地机器人、服务机器人、AGV叉车、工业机器人频频看到机器人的身影,足以说明激光雷达在人工智能产业链上不可或缺的地位。
文章插图
目前,乐动拥有三角测距及DTOF测距两系列雷达产品,能满足不同场景下对雷达的不同需求。那么他们有什么区别呢?今天我们就对这个问题进行解析。
三角激光雷达和DTOF激光雷达原理概述VS
三角激光雷达的原理如下图所示,激光器发射激光,在照射到物体后,反射光由线性CCD接收,由于激光器和探测器间隔了一段距离,所以依照光学路径,不同距离的物体将会成像在CCD上不同的位置。按照三角公式进行计算,就能推导出被测物体的距离。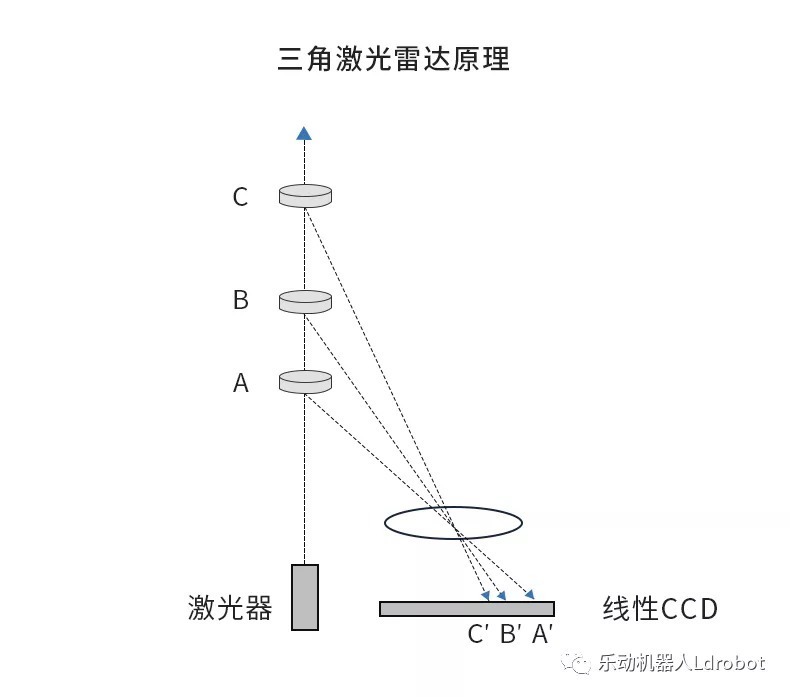
文章插图
DTOF是Direct Time of Flight的缩写,即飞行时间测距法,激光雷达内的激光模块发出经调制的脉冲激光,遇到物体后反射,通过计算激光发射到接收之间的时间差,来换算被测物的相对距离,DTOF测距精度高、测距远、响应快的优点。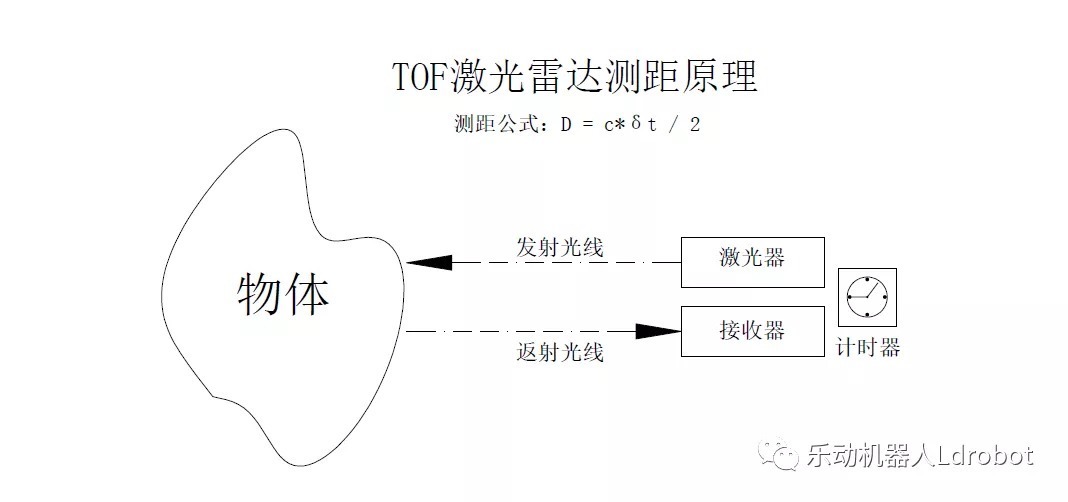
文章插图
三角激光雷达和DTOF激光雷达性能 VS
从用户的角度出发,用户最关心的两点:产品的功能和价格。先说性能,如果了解这个行业的人大多知道,DTOF激光雷达的性能在大部分的场景下是优于三角激光雷达的。
文章插图
1. 测距范围
DTOF激光雷达的范围是0.03-12m,三角激光雷达测距范围0.12-8m,产生差异的原因主要是测距的原理不同。
2. 测距频率
激光雷达扫描环境时,输出的是点云图像。每秒能够完成的点云测量次数,就是测距频率。三角激光雷达的测距频率一般都在3000Hz以下, DTOF雷达可达4500Hz。究其原因,DTOF完成一次测量只需要一个光脉冲,实时时间分析会很快响应。但是三角雷达需要的运算过程耗时则更长。
【 测距|乐动机器人激光雷达对比:DTOF激光雷达VS三角激光雷达】
文章插图
3. 精度
三角激光雷达在近距离下的精度很高,但是随着距离越来越远,其测量的精度会越来越低,这是因为三角测距的测量和角度有关,而随着距离增加,角度差异会越来越小。
所以三角激光雷达在标注精度时往往都是采用百分比的标注(常见的如1%),那么在20m的距离时最大误差就在20cm。而DTOF雷达是依赖飞行时间,时间测量精度并不随着长度增加有明显变化,因此大多数DTOF雷达在几十米的测量范围内都能保持几个厘米的精度。
整体来说,DTOF激光雷达的性能相较于三角激光雷达更加优越,应用于扫地机器人、服务机器人、AGV/AMR、农业机器人等领域。
- 白白胖胖头顶起雾走走停停安全无误在哈尔滨站候车厅内一边消毒一边在室内移动的智能消毒机器人...|火车站里的机器人服务,是什么体验?
- 机器人|售价10万的日本“妻子”机器人,除了生娃啥都能做?太天真了
- 王中林|华为全球专利榜第四;京东海外开设机器人零售实体店;Oculus遭反垄断调查|科技周报
- 大数据|人工智能步入千家万户,智能机器人的前景怎么样?
- 机器人|中国机器人“独角兽”,抢下国内90%份额,优势还在持续扩大!
- 机器人|老销售是怎么选电销机器人的?如何避坑?这些点需要注意
- 机器人|人工智能越来越发达,人类一身“毛病”,会被机器人取代吗?
- 产品经理|人工智能越来越发达,人类一身“毛病”,会被机器人取代吗?
- 机器人|安踏50%、特步80%,这是一个不容忽视的强烈信号?
- 割草机器人|大叶股份董秘回复:大叶割草机器人销量逐年上升