纹理|机器人也能有触觉!北航造了根机器手指,纹理识别准确率100%( 二 )
刚度感应测试实验中,用于试验的圆柱体被放置在手指下方,手指被激活后便会对物体施加压力,这种状态会保持4秒钟。实验中肌腱应变的各阶段数据同样会被记录。
之后,研究团队利用机器学习模型对这些数据进行分析,最终可识别出相应的物体纹理或物体刚度。经过验证,该方法在物体纹理的识别上达到了100%的准确度,在物体刚度识别方面准确度也达到了99.7%。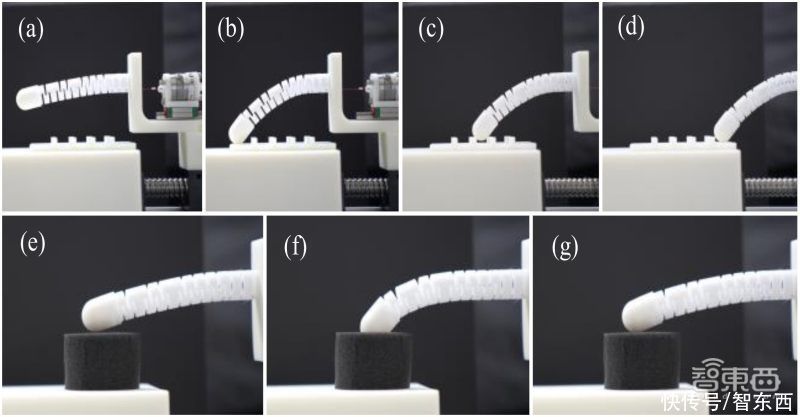
文章插图
进行纹理和刚度感应测试的试验过程
三、该技术将用于开发机器人和假肢“现有的关于神经支配仿生手指的研究大多都在之间表面安装传感器,虽然这些研究取得了不错的结果,但它们需要指尖传感器和物体进行精确的接触,这在实践中往往无法获得保证。”Chang Cheng说,“而我们的研究的关键又是在于传感单元位于肌腱上,因此手指上任何地方的接触都能产生特征信号输出,并可以用来推断触觉信息。”
该研究团队将传感器嵌入机器人的肌腱上实现新的触觉传感方法,这是一种前所未有的方式,经过试验他们发现这有很高的应用潜力。
将来,他们开发的这种系统可以用于开发更加先进的机器人和假肢。这些机器人和假肢可以拥有触觉并利用本体感觉反馈,而无需与物体表面进行完美或精确的接触。
Chang Cheng说:“我们现在正在探索该系统的滑动检测能力。当人类操纵或抓住某种东西时,滑动是不可避免的,因此检测和控制滑动对于机器人能否稳健可靠的控制物体来说至关重要。我们相信滑动检测将是一个很好的功能添加,我们的初步实验已经显示出非常有希望的结果。”
除了进一步开发这一系统外,该研究团队还正与一家纳米技术实验室开发一种低成本的触觉传感器,这种传感器可以感知力或扭矩信号,并可以放置在机器人的指尖上。他们已经创造了这种设备的原型,正在评估其性能。
结语:触觉传感技术让假肢也能拥有触觉柔软材料在采集触觉信息方面有着较明显的优势,并且由于其自身柔软的特性,与刚性材料相比更加适合用于制造仿生肢体和类人机器人。
在过去让软体机器人拥有触觉是一件较为困难的事,而该研究团队从人体和哺乳动物身上得到启发,巧妙的解决了这一问题,让机器人手指不仅可以识别物体纹理,还能识别物体刚度。
这一技术将被用于机器人开发和假肢制造上,让机器人和假肢也能拥有触觉。
【 纹理|机器人也能有触觉!北航造了根机器手指,纹理识别准确率100%】来源:arXiv、Tech Xplore
- DeepMind首席科学家:比起机器智能,我更担心人类智能造成的灾难
- 白白胖胖头顶起雾走走停停安全无误在哈尔滨站候车厅内一边消毒一边在室内移动的智能消毒机器人...|火车站里的机器人服务,是什么体验?
- 机器人|售价10万的日本“妻子”机器人,除了生娃啥都能做?太天真了
- 人类的工作会被AI取代吗?如果机器能够深度学习|为什么说AI能作巴赫的曲,却写不出村上春树的小说?
- 王中林|华为全球专利榜第四;京东海外开设机器人零售实体店;Oculus遭反垄断调查|科技周报
- 大数据|人工智能步入千家万户,智能机器人的前景怎么样?
- 机器人|中国机器人“独角兽”,抢下国内90%份额,优势还在持续扩大!
- 机器人|老销售是怎么选电销机器人的?如何避坑?这些点需要注意
- 机器人|人工智能越来越发达,人类一身“毛病”,会被机器人取代吗?
- 产品经理|人工智能越来越发达,人类一身“毛病”,会被机器人取代吗?