l5|造车企业们“不务正业”?L5自动驾驶或最早落地机器人( 二 )
文章插图
马斯克就表明,Tesla Bot可以和特斯拉汽车共享包括视觉方案在内的配件。
斑马智行联席CEO张春晖也表示:“目前低速物流等特定场景的自动驾驶正在加速应用落地,规模化以后对零部件、传感器等产业将会有巨大的带动作用。”
降速不降术,实现L5的高难度低速有助于全天候、全地域的自动驾驶技术落地,完成L5级别的技术积累。但同时,社区、酒店等复杂场景,让机器人需要适配更多现实需求,可以说“降速不降术”。
文章插图
(麦岩智能自清洁扫拖机器人“极光壹号”)
相比于无人物流和无人小巴的封闭园区,社区场景更为复杂,更接近无信号灯、人车混杂的道路环境。某种意义来讲,实际复杂场景下的技术积累有助于提升自动驾驶整体能力。在正式做到汽车L5之前,机器人成为L5落地甚至量产最具潜力的场景之一。
李宇浩在采访中提到,麦岩智能曾针对社区场景下的23种需求进行调研,发现社区中需求最高、难度最大的是清洁,其次是安保,第三是外卖进小区。这几大问题背后对应的是社区内人员混杂,人宠行为难以预测,路况十分多样。在社区机器人清扫工作中,既要适应多变的复杂路况;也要同时追踪躲避人和宠物的行动路径;还要分辨工作面上哪些是杂物,哪些是身份证和文件资料等有用物品。这就要求机器人对环境、对人、对物有极强的识别能力。
对于无人车与机器人自动驾驶技术来说,要想达到像人一样工作的高智能程度,就需要时刻对自己进行“灵魂三问”:
【 l5|造车企业们“不务正业”?L5自动驾驶或最早落地机器人】我在哪
我要到哪去
我怎么过去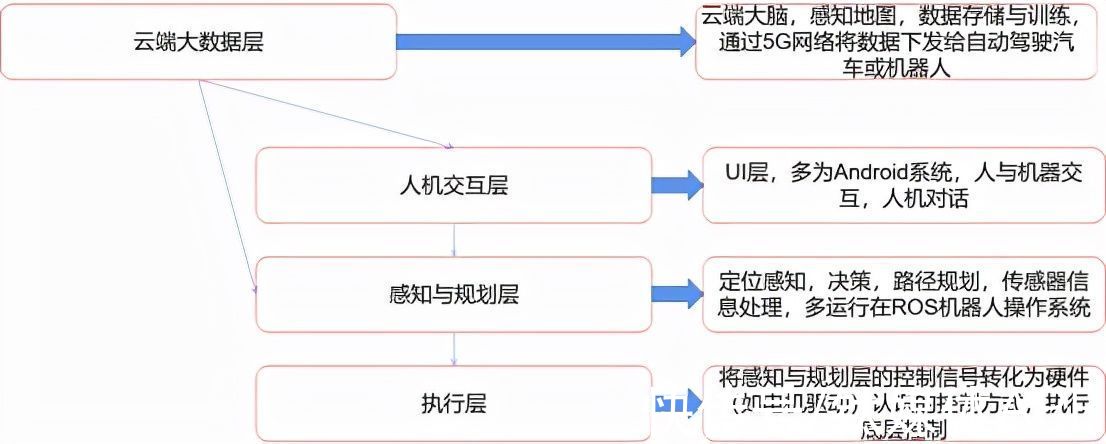
文章插图
“我在哪”:无论是机器人,还是自动驾驶汽车,首先都需要具备定位能力。通过自身搭载的各种传感器,如激光雷达、毫米波雷达、超声波雷达、车载摄像头、夜视系统、GPS、陀螺仪等,确定自身在某一坐标系下的位置,并正确感知周围的静态与动态障碍物,甚至建立周围的环境地图,这就是机器人环境感知技术,可以说环境感知能力是所有自动驾驶功能得以实现的基础。
“我要到哪去”:L5级别的自动驾驶系统需要具有自主决策规划的能力。比如对于配送机器人来说,把货物安全送达正确地点即为决策目标,对于清洁机器人来说,尽可能全面的覆盖地面即为决策目标,对于自动驾驶汽车来说,选择最优出行线路即为决策目标。
“我怎么过去”:当自动驾驶系统知道自己的当前位置与要去的位置的时候,就该考虑要怎么过去了,这就是第三块重要的技术内容-路径规划,障碍物规避与运动控制,路径规划技术的目标就是在已知地图上,在当前位置与目标位置之间选择一条最优的路径作为运动轨迹,障碍物规避技术则是利用机器人或无人汽车上自身携带的激光雷达、毫米波雷达、超声波雷达、车载摄像头、夜视系统等一系列距离感知传感器感知障碍物并进行规避,运动控制技术则是最后的执行机构,保证机器人或自动驾驶系统能够快速达成上述目的。
总的来说,汽车或者机器人的自动驾驶技术,主要就由环境感知、行为决策、路径规划和运动控制四个方面构成。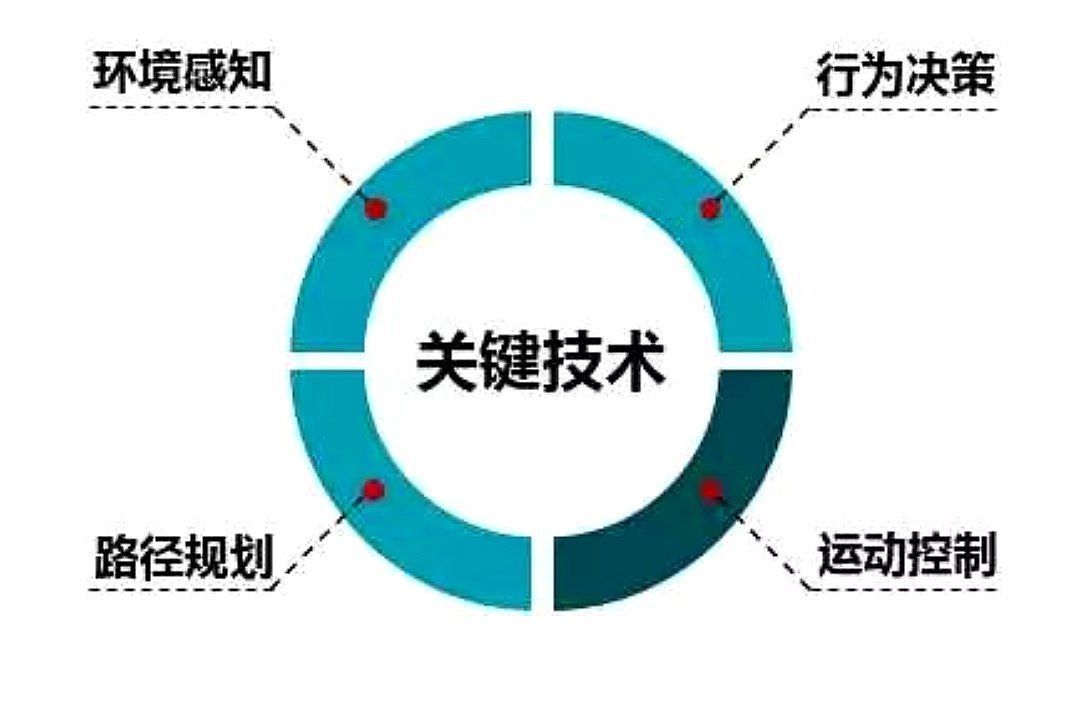
文章插图
在现实场景中,自动驾驶除了对内的“灵魂三问”外,还要面临对外的“灵魂一答”,与人的交互。如何读懂指令并且有效反馈,是机器能否取代人的一个关键因素。人机交互,其交互对象与交互方式都并不单一。
- 华为|问界M5风光无限,赛力斯SF5暗自神伤,华为或许低估了造车这事?
- 造车|苹果造车一波三折,缺了一家“富士康”
- 智能制造|企业转型的新时代,夹缝中求生存
- 传感器|称年轻,我们怎么做到经济自由?
- 文和友|泡泡玛特与飞书达成合作 新消费代表企业加速迁移飞书
- 我们的生活|社交正在推动“孤独生意”多元化发展,天聊将重塑用户精神世界!
- App Annie:2021 年人们平均每天玩手机近 5 小时
- iPhoneSE|iPhone SE3发布在即,亿万果粉们即将沸腾起来!
- |电脑界有两种说法“高U低显”和“低U高显”,你们觉得哪个合理?
- 联想Yoga|国产手机支持国产手机产业链的发展?苹果揭开了它们的遮羞布